


(一)項(xiàng)目介紹
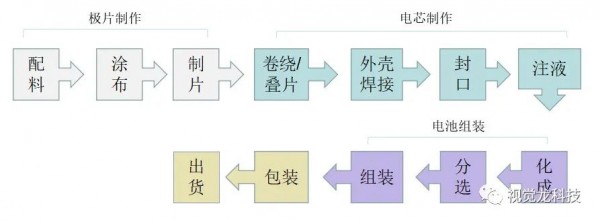
鋰電池的生產(chǎn)流程多,工藝相對(duì)復(fù)雜。從整個(gè)制作流程來(lái)看,大致可以分為極片制作、電池單元(電芯)制作和電池組裝三個(gè)工段。本次主要針對(duì)第三個(gè)組裝工段提供視覺(jué)線體解決方案。
視覺(jué)龍結(jié)合客戶實(shí)際情況,提供了一套性價(jià)比最優(yōu)的柔性解決方案。一共檢測(cè)動(dòng)力電池蓋板、防爆片、極柱、塑膠板、PET膜五處產(chǎn)品。

項(xiàng)目采用“龍睿AIoT平臺(tái)”2D和3D技術(shù),以及多樣化的光學(xué)方案,能夠?qū)崿F(xiàn)上下料、對(duì)位裝配、正反和方向檢測(cè)、尺寸檢測(cè)、毛刺檢測(cè)、破損檢測(cè)、疊料檢測(cè)、焊接質(zhì)量檢測(cè)和讀碼。
(二)檢測(cè)效果
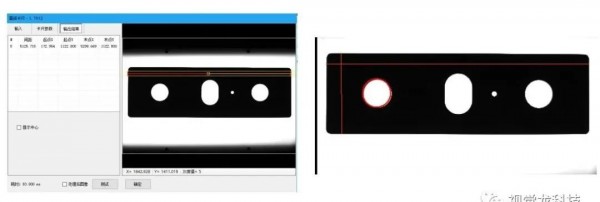
蓋板的正反和方向檢測(cè)
蓋板尺寸檢測(cè)
蓋板表面平面度檢測(cè)和焊縫檢測(cè)
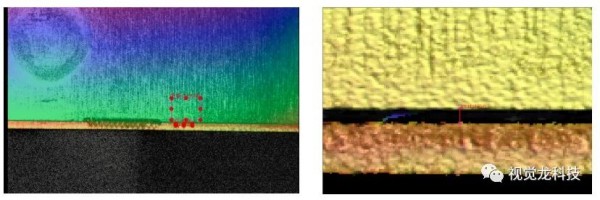
蓋板表面平面度檢測(cè)和焊縫檢測(cè)

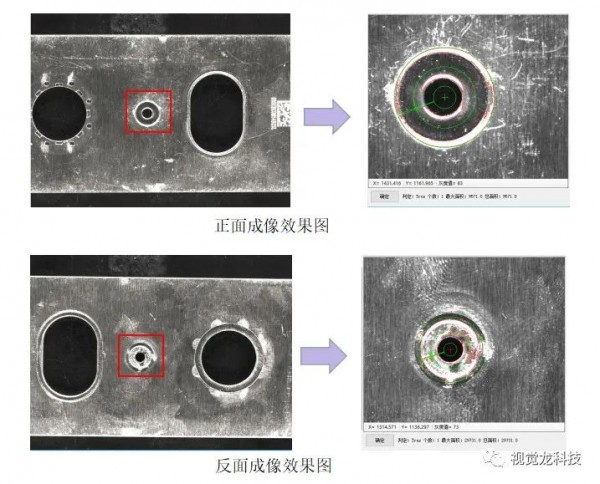
防爆片正反檢測(cè)

防爆片疊料檢測(cè)

采用飛拍方式,視覺(jué)引導(dǎo)機(jī)械手裝配。
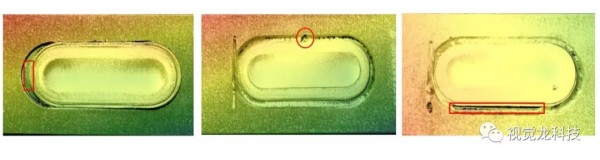
防爆閥焊接質(zhì)量檢測(cè),檢測(cè)防爆墊焊道過(guò)高、焊偏、焊渣、孔洞、斷焊等不良。

密封圈正反檢測(cè)

采用飛拍方式,獲取密封圈在機(jī)械手上坐標(biāo)與放料位坐標(biāo)信息后,視覺(jué)引導(dǎo)機(jī)械手裝配。

極柱正反檢測(cè)

極柱上料和下料位視覺(jué)定位,引導(dǎo)機(jī)械手放置。

極柱焊接質(zhì)量檢測(cè),檢測(cè)焊道是否焊渣、氣泡、孔洞等不良。

塑膠件的正反和方向檢測(cè)。

本方案采用的“龍睿AIoT”是一款低代碼、功能可視化、模塊化的視覺(jué)平臺(tái),視覺(jué)工具拖拽式,無(wú)技術(shù)背景也可上手操作。 它包含幾千種算法,架構(gòu)開(kāi)放、支持多線程多任務(wù)并行處理。龍睿擁有2D視覺(jué)、3D視覺(jué)、彩色視覺(jué)、AI深度學(xué)習(xí)視覺(jué)、視覺(jué)溯源、邊緣計(jì)算等技術(shù),可以連接各類相機(jī)和傳感器,實(shí)現(xiàn)智能制造、高端農(nóng)業(yè)、智能物流、智慧城市和智慧醫(yī)療等多領(lǐng)域應(yīng)用場(chǎng)景。